Well tomorrow is when some magical spells will be cast and I’m very excited for it, but I can’t say what’s happening until it happens, because.
So I’m shitposting about it, and posting random silly images. Stay tuned out there in TV land.
Satellite system can’t find a signal. Solution: try severely side eyeing itENJOY THE RAINBOW SPARKLE GAZE OF MY DARK EVIL SOULSome group I am in was doing this post your glow up and… YesBack focus on this! Ha, no wait, don’t. Reminding myself to post a PDF of my silly printable back focus chart
Apparently, Galaxy 17 is pretty interesting to tune in nowadays on a Ku band satellite truck, there are exactly three transponders known to be used on there now and they’re all intermittent event feeds. Only thing coming down from there is the beacon.
And in case you’re wondering if you can fit Tauros in the truck:
(to the tune of the Ouran High School Host Club opening theme)
…. Look who just fixed this transmitter by sniffing it.
Previously, on site, it just wasn’t happy – the power supply wasn’t coming up and it’d report 4500 watts forward and reflect, or it’d start boot looping. Updating the firmware fixed the boot loop, but I still wasn’t getting a proper power on sequence and couldn’t get out of RF mute.
I brought it home, hooked up a dummy load, and Cassie eventually came along and sniffed it.
Well, until very recently, I never would have thought about USB storage in the context of air conditioners, but… yeah, here we go.
Enter the York SSE controller board.
It’s cute. It’s needlessly complex. It’s actually as simple as it could be for being needlessly complex. Noot noot!
The board itself is a multi functional thing that apparently can be present in any of a few configurations. It could be in the condenser of a split system, inside the control box area of a rooftop package unit, or probably any of a number of other configurations that would surprise me.
In this case I was looking at one inside a condenser on a split.
Spaghetti Central
This unit was newly installed as of a few months ago and it’s been a kinda rough start. Either right out of the crate or shortly after installation, one of the two temperature probes that connects to the controller went bad. It’s the one connected via two orange wires and the probe end is clamped and gooped to the suction line on the compressor. We had one near facility meltdown after the controller stopped the system in response to the bad sensor.
Once the sensor was replaced, I ran into another oddity wherein it was 90 degrees inside and 31 degrees outside, something was not right up there.
The way this system works is moderately odd compared to what I grew up with. On this system, the 24VAC control transformer is in the condenser on the roof (not entirely unheard of… but different). Down inside the building, the air handler has a Delta variable frequency drive in it controlling the blower. York, uh, “helpfully” password protected everything on this at the factory so you can’t even see how it’s configured, as you know, a job security measure. Gag me with a damn spork. It takes a constant current input setting the motor speed and a contact closure on the M2 terminal enables the fan. There’s also a relay output on the drive that goes… who knows where. The good news is, literally nothing on this drive will ever require you to adjust it as all the brains of the system are on the SSE board.
Fortunately there’s really nothing too special about that and if one did have to replace the drive, it wouldn’t be a total show stopper.
Anyway… I discovered that the factory configuration, which no one from our HVAC company (which is so great that we’re replacing them next month) touched, was not right. Not right at all.
First off… in this configuration, the indoor unit blower speed is to be set to “Fixed Variable”, which sounds about like Jumbo Shrimp, but it just means that the blower speed is set to a certain percentage on the SSE board instead of being controlled to meet a duct pressure setpoint for Variable Air Volume operation. The Fixed Variable option has set points for each cooling stage, assuming you have a multi stage cooling system (thermostat with Y1, Y2, …. wires). Well… this… doesn’t. It’s a single stage condenser, yet it shipped with some weird factory defaults in the SSE board that had it run the fan at a low speed, something like 40% for the Y1 stage. Being a single stage, this only had one yellow wire, so it only had a Y1… and it barely moved air. I went into the Details menu on it and adjusted the Y1 speed to 100%. Surprise, now it’s no longer hot on one side of the room it cools and cold on the other!
The more glaring issue was that it shut down when the outdoor air temperature was cold…. I found it had a default that cut it out when the outdoor air temp was below 45 degrees F. This could simply be disabled.
Before I made any changes though, I took a backup of the settings. On the middle of the board is a USB host port. Of course, the photo I took of it has a camouflaged USB drive stuck in it which is almost the same green as the board. It’s below and to the right of the big IC in the middle.
The instructions say to use a USB drive formatted with a FAT filesystem. I have this particular drive set up for legacy stuff – it’s got one partition just under 4 gigs in size, formatted to FAT. When it’s plugged in the display will say something like “USB OK / SCAN n” where n is the number of files on the drive.
You can then proceed to the Update menu and choose Backup, and it will dump a CSV file titled with the date and time. The date and time are not correctly set on this unit and I am not sure if there’s a battery backed realtime clock, so I didn’t bother trying to set it. It came up in 2002 or something.
The settings can also be restored from the USB drive. The file format is a strangely user-friendly CSV that will open straight up in Excel or OpenOffice Calc with all the rows and columns labeled. I was not expecting this at all. I was expecting to get an inscrutable binary blob that can be read and written only by some utility that requires you to have an old Windows XP system to support one particular version of Java that its user interface is coded in. I was very pleasantly surprised.
So all that being said, I recommend you take a backup of your configuration if you have one of these systems. If that board ever has to be replaced, this will save a LOT of time determining and re-entering the configuration. The user interface controls are those two buttons and the tiny joystick frobozz right below the LCD and it is not exactly pleasant to use at all.
That moment when you find a very load bearing server on which a process has been repeatedly crash dumping since about August this year, squirting out thousands of 512Kbyte dump files until it’s generated about 1.7 terabytes of them and the machine is almost out of disk space, you find that any attempt to delete them barely deletes, oh, maybe one or two files per second, and then you find out that the mechanical hard drive based raid volume the thing runs on has never once been defragmented since the day it was commissioned
I’m sorry, it’s time to go home and cuddle with Cassie now
They started decorating the set for Good Day Sacramento on Tuesday. It wasn’t even Thanksgiving yet. They subjected me to that Mariah Carey abomination. I hissed a lot and retreated to the tech core where I have the U-Matic VTRs. Deck the halls with Ampex 197, you heathens.
I just now noticed this was 3M tape, no wonder I wasn’t having to fight with it as much.
I got new sets of drive belts for these machines from Zin VTR Works and now the decks are happy again. So far I have three working, along with one of my own. Wait, one of my own, what? Well I saw this one at PPSP Recycling and bought it. All the belts were snapped but a kit from Zin reawakened it. It’s got mystery field modifications that no one I’ve asked could identify, but it just works as one should.
The panel on the right side normally contains nothing.In Sony’s bizarre wisdom they decided to put a lot of the analog signal paths on this board that flips up over the transport. Normally the older VO series decks had either a record amplifier or simply nothing up there. Makes head cleanings more fun I guess.
And now, what I’m sure you really came here for: cursed weirdness and memes.
This meter turned out to be affected by some kind of curse that made the resistance measurements fly from about 4K to over range, no matter what range was selected, but still allowed it to zero correctly in all ohms ranges.This meter is not cursed. For now, at least.The Nozzle.This cursed plug that is just asking to light you the hell upIn the case of the cursed meter, this cheap thing I bought off Temu confirmed that I was simply dealing with cursed test equipment. I’m actually surprised at how well it works, but would be terrified of the idea of putting more than like 48vdc into it.
So we got these new multifunction printer/scanner/fax machines at work, some newer thing from Canon, and they’re absolutely ridiculous. When you walk up to one you’re presented with a login prompt with a horrible on screen keyboard, but also with an RFID reader. Once you’ve logged in you can link it to whatever RFID macguffin you’re carrying.
My director of technology successfully did it with his access control badge, but the machine kinda just… did … things… without any useful feedback as to it linking successfully.
I tried it and the RFID reader beeped and the machine didn’t respond. I logged out and back in (this takes three whole ass minutes). Nothing.
On a whim I tried making my Flipper Zero emulate the UID of my Clipper card.
*beep* success.
The actual Clipper card works too.
Clearly this is a sign from the universe of the superiority of public transit
I really like this photo I took of myself on Halloween. Really I could get all fancy like this any time but this was just unusually good.
Then, a few days later, I had to go make a run down to our tower to deal with a lack of LED glow. I guess I could have just put my glasses up on top, but that wouldn’t have been compliant with FAA regulations.
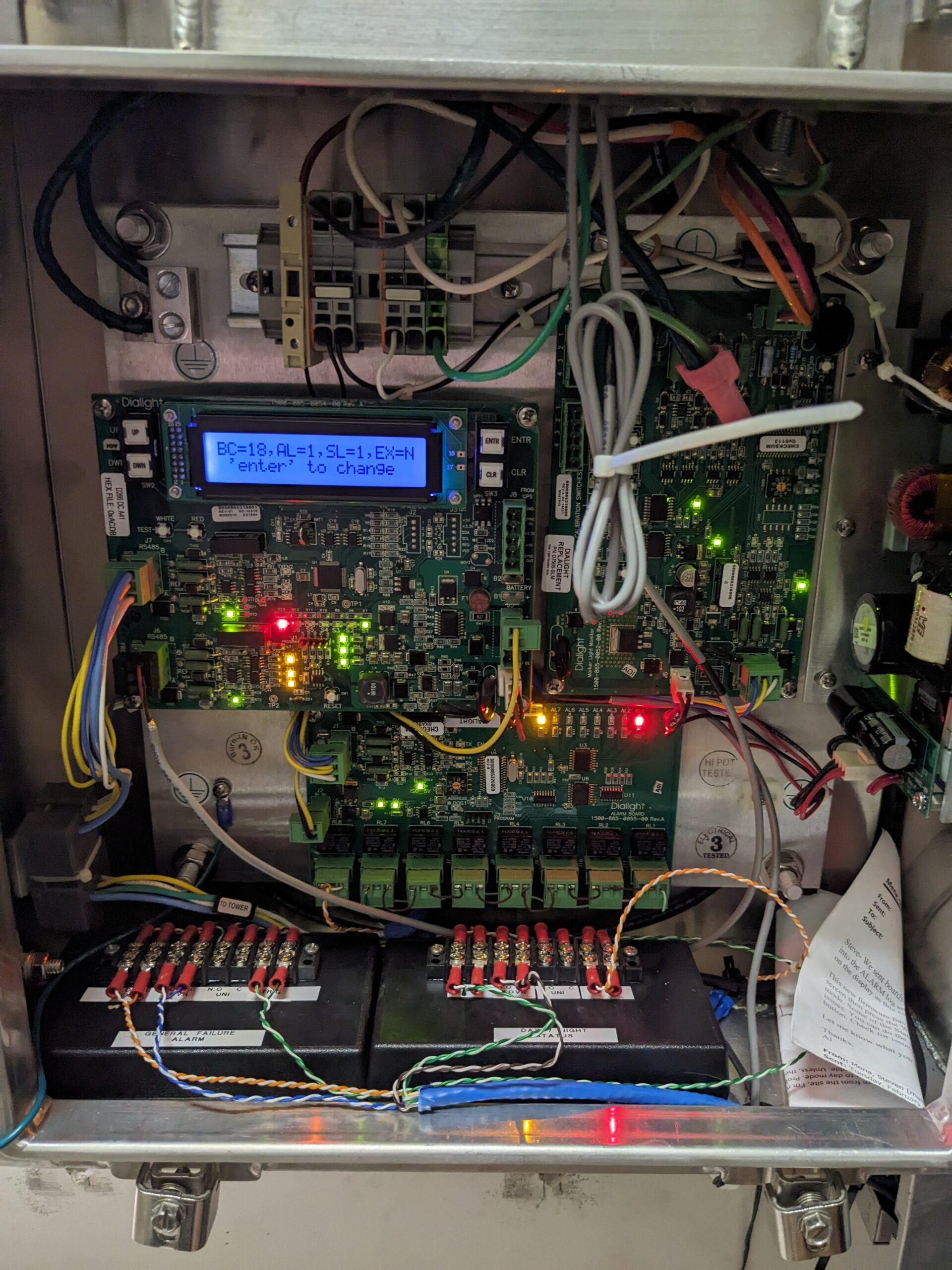
So it turns out this needlessly overcomplicated crazy-ass thing that communicates with all the LED tower strobes will get stuck in A Bad State if the strobes lose power, and you have to reboot it. Weirdly, unlike every other tower strobe system I’ve ever worked with, if you lose communications or the controller dies, it seems like the strobes just power down and do nothing. Most I’ve worked with have a failsafe that comes right up wherein they switch to day mode (maximum intensity) and just strobe without any regard to synchronization. The effect of this is a tower that looks like a funky twinkling disco ball, but remains visible.
By pressing down this special key, it plays a little melody.
Ultimately, it would turn out nothing was blown and the controller needed a full power cycle, NOT a press of its reset button which stands out there right below that row of red LEDs. Go figure.






























































{kind=link}